Посилання
Звіт про пошук
Автореферат
Бібліотека
Про Мальту
Кафедра
Факультет
ДонНТУ
Автореферат магістерської роботи.
Тема: "Векторні системи керування із спостерігачами стану"
Історично склалося так, що постійний струм був найпоширенішим і застосовним для електродвигунів у сфері виробництва аж до кінця ХХ століття. Це було обумовлено в першу чергу високим КПД, жорсткою механічною характеристикою і широким діапазоном регулювання частоти обертання. Машини, що працювали на змінному струмі, традиційно програвали за цими показниками і застосовувалися лише на маловідповідальних і не вимагаючих високої точності регулювання установках.
Але з недавнього часу наука далеко зробила крок вперед в плані напівпровідникових елементів і мікропроцесорних пристроїв, у зв'язку з чим з'явилася величезна база для вдосконалення систем управління приводами змінного струму. З'явилася можливість створювати регульовані електроприводи, засновані на інших законах керування.
Одним з найперспективніших принципів є векторне керування. Він був сформульований на початку 70-х років ХХ століття в роботах Ф.Блашке. Ідея полягає у тому, що система векторного керування орієнтується по вектору потокозчеплення ротора. При цьому момент двигуна орієнтується по поперечній складовій вектора струму статора, а магнітний потік є подовжньою складовою. Це дозволяє організувати керування двигуна аналогічним двигуну постійного струму, а також одержати аналогічні динамічні характеристики при частотному керуванні.
На анімації для простоти показані зміни проекцій вектора потокозчеплення ротора на системи координат статора.
Системи векторного керування АД мають високу стабільність і малочутливі до зовнішніх чинників. Це обусловлює їх широке застосування в промисловості, де вони максимально реалізують свої споживацькі можливості. Легко реалізовуються різні закони оптимального керування.
Для створення високоточної і швидкодійної системи, як правило, використовується принцип підлеглого керування по декількох координатах (величинам) двигуна. У даній системі це може бути струм статора, швидкість обертання ротора і потокозчеплення. Останню величину цілком можна оцінити побічно через значення струмів, напруг і частоти обертання.
Метою ж моєї роботи є розробка системи векторного керування без фізичного зворотного зв'язку по швидкості, що дозволяє виключити тахогенератор і, відповідно, підвищити надійність електроприводу.
Наукова новизна роботи полягає в розробці нового методу керування асинхронного двигуна без застосування датчика швидкості на основі спостерігача стану. Запропоновані різні варіанти поліпшення якості оцінювання сигналу, які можуть застосовуватися в подібних системах керування.
В результаті проведеної роботи планується створити автоматичну систему векторного керування АД без датчика швидкості, астатичну по навантаженню. При цьому її динамічні характеристики не поступатимуться аналогічним системам з датчиком і ПІ-регулятором швидкості.
Огляд існуючих досліджень і розробок:
I. Магістерська робота Бондаренко Е.А. : "Розробка системи векторного керування асинхронним електроприводом із спостерігачами стану". Пропонується побудова системи з застосуванням регулятора динамічного моменту. "В ході виконання роботи була досліджена система векторного керування асинхронного двигуна із спостерігачами стану, яка дозволяє забезпечити астатизм системи по навантаженню без зменшення її швидкодії. Основні результати роботи наступні:
1. Розроблена математична модель асинхронного двигуна з короткозамкнутим ротором в ортогональній системі координат, орієнтованої по вектору потокозчеплення ротора, яка використана при дослідженні статичних і динамічних характеристик двигуна, а також при проектуванні системи векторного керування.
2. Обгрунтована доцільність регулювання динамічного моменту з метою підвищення астатизма за навантаженням, і синтезовані регулятори відповідної системи векторного керування з підтримкою постійності потокозчеплення ротора. Синтезований канал керування потокозчеплення (регулятор подовжньої складової струму статора і регулятор потокозчеплення ротора) і канал регулювання швидкості (регулятор динамічного моменту і регулятор швидкості).
3. Синтезовані різні варіанти спостерігачів стану повного порядку (по відношенню до об'єкту спостереження), що дозволяють відновити сигнал динамічного моменту: першого і другого порядку, а також два варіанти спостерігачів третього порядку (на основі повної моделі об'єкту керування каналу швидкості і на основі згорнутої моделі контура регулювання динамічного моменту). Встановлено, що з боку простоти технічної реалізації ефективнішими є перший і останній з перерахованих спостерігачів стану, які були синтезовані.
4. Оцінені статичні і динамічні характеристики системи векторного керування із спостерігачами стану, а також вплив останніх на ці характеристики. Встановлено, що відмінність динамічних властивостей (динамічна помилка і наявність коливальної), яка, проте, є дуже незначної навіть в перехідних режимах роботи, зростає разом з підвищенням порядку спостерігача. Застосування кожного з розроблених спостерігачів стану є перспективним для оцінки динамічного моменту з метою підвищення астатизма системи векторного керування.
5. Оцінена можливість застосування спостерігачів стану з постійними коефіцієнтами при двузонном регулюванні швидкості. Встановлено, що їх застосування є повністю можливим і ефективним, оскільки приводить до незначного поліпшення динамічних властивостей системи векторного керування в динамічних режимах."(http://masters.donntu.ru/2005/eltf/bondarenko/diss/index.htm).
II. Розробка НТЦЕ "Вектор" "АДАПТИВНА СИСТЕМА ВЕКТОРНОГО КЕРУВАННЯ АСИНХРОННИМ ЕЛЕКТРОПРИВОДОМ"
"1.Розроблена нова серія асинхронних електроприводів з векторними принципами керування, володіюча функціями адаптації до параметрів роторного ланцюга, механічної частини приводу, динамічним неідеальністям інвертування і автонастройки параметрів системи керування на параметри силового каналу приводу. Електропривод орієнтований на застосування для керування механізмами і технологічними процесами, що пред'являють підвищені вимоги до динамічних характеристик і діапазону регулювання швидкості.
2.Представлений алгоритм компенсації неідеальностей інвертування напруги дозволив мінімізувати вплив затримок перемикання і "мертвої" зони в комутаціях верхнього і нижнього ключів фази на точність завдання напруги статора і, як наслідок, понизити пульсації на малих рівнях швидкості і розширити діапазон її регулювання.
3.Алгоритм автонастройки параметрів системи керування, реалізований у вигляді опції, дозволяє на основі формування в приводі спеціальних тестових режимів, реалізовуваних виключно внутрішніми засобами приводу, автоматично визначати активний опір статора і ротора, індуктивність намагнічення, еквівалентну індуктивність розсіяння статора, момент інерції приводу і на їх основі розраховувати всі параметри і коефіцієнти системи векторного керування.
4.Запропонований алгоритм адаптації до зміни параметрів механічної частини приводу, реалізований у вигляді опції, дозволяє здійснювати первинну настройку системи керування на момент інерції приводу в спеціальному тестовому режимі роботи, а також обчислювати момент інерції і момент навантаження в звичному режимі роботи приводу, забезпечуючи відповідну настройку системи керування. Цей алгоритм може бути автономно-реалізованою частиною алгоритму ідентифікації і керування багатомасовою нежорсткою механічною системою.
5.Алгоритм адаптації до температурної зміни постійної часу ротора дозволяє оцінити величину Tr і Rr на основі взаємозв'язку між потокозчепленням ротора і миттєвою реактивною потужністю АД, обчислюваної по напругах і струмах статора, а також виконати підстроювання параметрів системи керування за наслідками цих оцінок. В результаті забезпечується інваріантність характеристик приводу до зміни Rr. Алгоритм простий в реалізації, нечутливий до Rs, не вимагає інформації про швидкість ротора, працездатний аж до нульової швидкості."(http://vectorgroup.ru/articles/article4)
III. "Бездатчиковая система векторного керування з орієнтацією по вектору потокозчеплення ротора" Автори: Дарьенков А. б., Марков В. У., Тітов В. Г. Ніжегородській державний технічний університет.
Проведений короткий аналіз якості оцінювання необхідного сигналу залежно від інтервалу дискретності.
IV. "Системи непрямого регулювання швидкості із спостерігачами стану" Автори: Толочко О.І., Піськоватськая О.В., Кудокоцев С.М. Донецький національний технічний університет.
У даній статті проведений аналіз двох варіантів спостерігачів стану стосовно двигуна постійного струму, запропонований спосіб коректування спостережуваного сигналу швидкості до фактичного, реального значення шляхом обчислення статичного струму і закладу відповідного коректуючого зв'язку на вхід системи. Ідея може успішно застосовуватися в подібних системах, зокрема, у векторному керуванні.
Існують математичні моделі АД, які дозволяють обходитися без датчика швидкості, обчислюючи її поточну координату власне по математичному опису двигуна, але їх точність і діапазон регулювання швидкості при цьому погіршуються. Другим варіантом відновлення координати швидкості є побудова спостерігача стану, синтез якого буде описаний в даній роботі. Найточніше відновлення координати досягається синтезом спостерігача мінімального порядку. Але на практиці це виявляється не зовсім виправдано через необхідність застосування додаткових пристроїв для вимірювання вхідного або коректуючого сигналу.
У даній роботі описується побудова спостерігача стану повного (3-го) порядку, входом якого є завдання напруги на тиристорний перетворювач (вихід регулятора струму). Головною спостережуваною координатою є частота обертання. Коректуючий зв'язок здійснюється по змінній стану струму. При побудові моделі спостерігача враховувалася протиЕДС, яка склала замкнутий контур, тим самим забезпечивши спостережливість об'єкту. Коефіцієнти коректуючих зворотних зв'язків розраховувалися, вибравши за бажаний поліном Баттерворта.
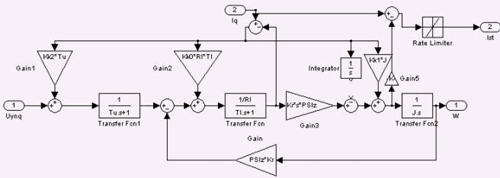
Рис.1 Модель спостерігача стану з ідентифікацією статичного струму.
Для моделювання був вибраний конкретний двигун: МТК-12-6. При замиканні системи по власних координатах і контролі спостережуваної швидкості спостерігається поява помилки між реальною і спостережуваною швидкістю, рівною 20% .
В результаті проведення досліджень було визначено 3 способи усунення помилки:
1. Підбір власної частоти спостерігача w0. Для даної системи оптимальним значенням виявилося 2/Tu, де Tu- постійна часу тиристорного перетворювача. Помилка склала 0%.
2. Додавання додаткового інтегратора в модель спостерігача. Величина, що інтегрується, - різниця струмів двигуна і спостерігача. Вихід інтегратора підсумовується з моментом двигуна. Це також дозволило повністю ліквідовувати помилку, при цьому швидкодія системи не погіршала.
3. Ідентифікація статичного струму і заведення його на вхід системи. Даний спосіб дозволяє побудувати систему, астатичну по навантаженню.
Застосування комбінації 1-го і 2-го методів дає практично ідеальну відповідність спостережуваної і дійсної швидкості. Результати представлені на Рис.2,3. Де : 0- власна швидкість, 1- w0=2/Tu, 2 - w0=1/Tu застосований інтегратор. 3 - w0=2/Tu, без інтегратора.
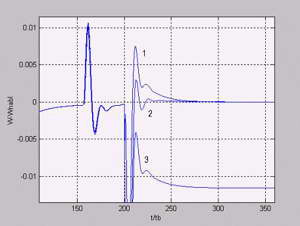
Рис.2. Графік залежності помилки оцінювання швидкості від нормованого часу в околиці накладення навантаження.
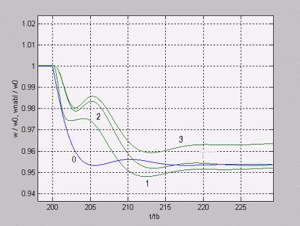
Рис.3. Графік залежності нормованої реальної і спостережуваної швидкості від нормованого часу в околиці накладення навантаження.
Виходячи з результатів дослідження, можна зробити висновок про практично можливе застосування даної моделі спостерігача для точної ідентифікації швидкості в системах векторного управління АД.
У разі вимоги астатизма системи по обуренню застосовується обчислення статичного струму і заведення його через коефіцієнт Kis, рівний відношенню падіння швидкості в системі, замкнутій по спостережуваній координаті до падіння швидкості в розімкненій системі на вхід регулятора струму напряму або ж на вхід регулятора швидкості із зворотним йому коефіцієнтом. Динамічні властивості такої системи представлені на рисунках 4,5. При цьому система замкнута по спостережуваній швидкості.
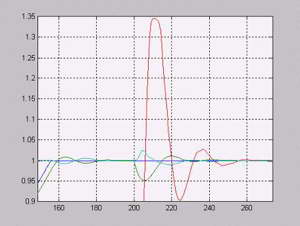
Рис.4. Динамічні характеристики двигуна в околиці накладення навантаження.
На рис.4. червоним позначений струм, зеленим - швидкість.
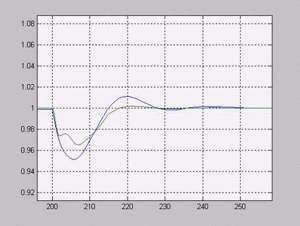
Рис.5. Точність оцінювання швидкості в околиці накладення навантаження.
На рис.5 синім показана реальна швидкість, зеленим - спостережувана.
Хоча одержані результати цілком можна назвати задовільними, напрямом моєї подальшої діяльності все ж таки буде поліпшення якості перехідних процесів, зокрема, зменшення перерегулювання і коливальної. Також проводитиметься подальший аналіз існуючих і пошук інших способів усунення помилки оцінювання і можливостей побудови астатичної системи.
Література
- Толочко 0.І. Аналіз та синтез електромеханічних систем зi спостерігачами стану: Навч. посібник. - Донецьк: Норд-Прес, 2004. - 298с.
- 2. Калашников В.И. Основы векторного управления асинхронным электроприводом без датчика скорости // Проблемы автоматизированного электропривода. Теория и практика : Сборник трудов научно технической конференции - Харьков: Основа, 1998. - С. 128-129.
- Литвинов Р.Д. Метод расположения корней характеристического полинома, обеспечивающий заданные степень устойчивости и колебательность системы . Автоматика и телемеханика. - 1995. - №4.-с.53-61.
- Толочко О.И., Коцегуб П.Х., Федоряк Р.В. Анализ линейных систем с наблюдателями состояния. // Вісник Харківського державного політехнічного університету. Збірка наукових праць. Тематичний випуск: Проблеми автоматизованого електроприводу. Терія і практика. - Харків: ХДПУ. - 2000. - №113. - С.78-82.
- Акимов Л.В., Долбня В.Т., Колотило В.И. Системі управления єлектроприводами постоянного тока с наблюдателями состояния: Монография. - Харьков: ХГПУ, 1998. - 117с.
- Толочко О.І., Пісковатська О.В., Кудокоцев С.М. Системи непрямого регулювання швидкості зі спостерігачами стану // Наукові праці ДонНТУ. Серія "Електротехніка і енергетика". - Донецьк: ДонНТУ. -2003. - №67. - с.168-173.
- Автореферат магистерской работы Бондаренко Е.А. http://masters.donntu.ru/2005/eltf/bondarenko/diss/index.htm
Автобіографія | Посилання | Звіт про пошук | Автореферат | Бібліотека | Про Мальту